WaveShare Electronics
₹2,327.97 + 18% GST
B2B GST Credit Available
10-axis ROS IMU Sensor With Integrated ARM 32-bit DSP Processor / BLE 5.3 Bluetooth / High-precision Accelerometer / Gyroscope / Magnetometer / Temperature & Pressure Sensor
₹2,747.00
All Inclusive, Shipping Calculated at Checkout
Assured Cashback of ₹ 23
B2B GST Credit Available
Price in reward points: 2328
- Stock: 1 in Stock
- SKU: 29207
- Delivery Time
- Bulk & B2B RFQ
10-axis ROS IMU Sensor With Integrated ARM 32-bit DSP Processor / BLE 5.3 Bluetooth / High-precision Accelerometer / Gyroscope / Magnetometer / Temperature & Pressure Sensor
This product is a 10-axis IMU sensor, integrated with an ARM 32-bit DSP processor, BLE 5.3 Bluetooth, high-precision accelerometer, gyroscope, magnetometer, and temperature & pressure sensor.
![]() User Manual / Datasheet / Example Codes Etc.
User Manual / Datasheet / Example Codes Etc.
Feature
- Adopts self-developed attitude estimation algorithm, offering strong real-time performance and high precision, stable, and drift-free operation
- Supports UART and BLE 5.3 Bluetooth communication to assist motion attitude and orientation detection of robot
- Supports using with Bluetooth devices with Android, iOS, Windows, and Linux systems
Specifications
- Product: 10 DOF ROS IMU (A)
- Power Supply: 3.3V~5V
- Baud Rate: 115200
- Interface Package: ZH1.5-4A
- Communication Format: 8 data bits, 1 stop bit, no parity bit
- Data Packet Format: Preamble + Start Code + Address + Length + Data Body + Checksum + End Code
- Data Output: Acceleration, angular velocity, magnetic field vector, temperature, atmospheric pressure, Euler angles, quaternion
- Accelerometer:
- Range: ±16g
- Resolution: 0.00048g
- Gyroscope
- Range: ±2000°/s
- Resolution: 0.061°/s
- Magnetometer:
- Range: ±8Guass
- Resolution: 0.12uT
- Temperature Sensor:
- Range: -45℃~85℃
- Resolution: 0.01°C (onboard temperature)
- Barometer:
- Range: 300hPa~1200hPa
- Resolution: 0.006hPa
Package Includes
- 10 DOF ROS IMU (A) x1
- Nylon case x1
- ZH1.5 4PIN cable ~300mm x1
- Screwdriver x1
- Screwspack x1

Interface Introduction

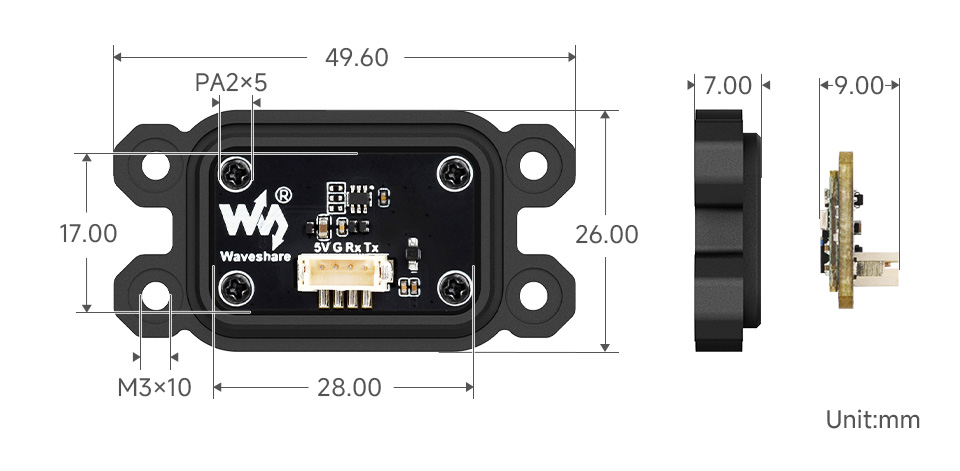
Dimensions